
- Projekt jest odpowiedni dla początkujących i zaawansowanych
- Główne komponenty to Arduino Uno, silniki, czujniki i zasilanie
- Proces obejmuje montaż sprzętu i programowanie w Arduino IDE
- Możliwość stworzenia różnych typów robotów, np. Line Follower
- Nauka przez praktykę - elektronika i programowanie w jednym projekcie
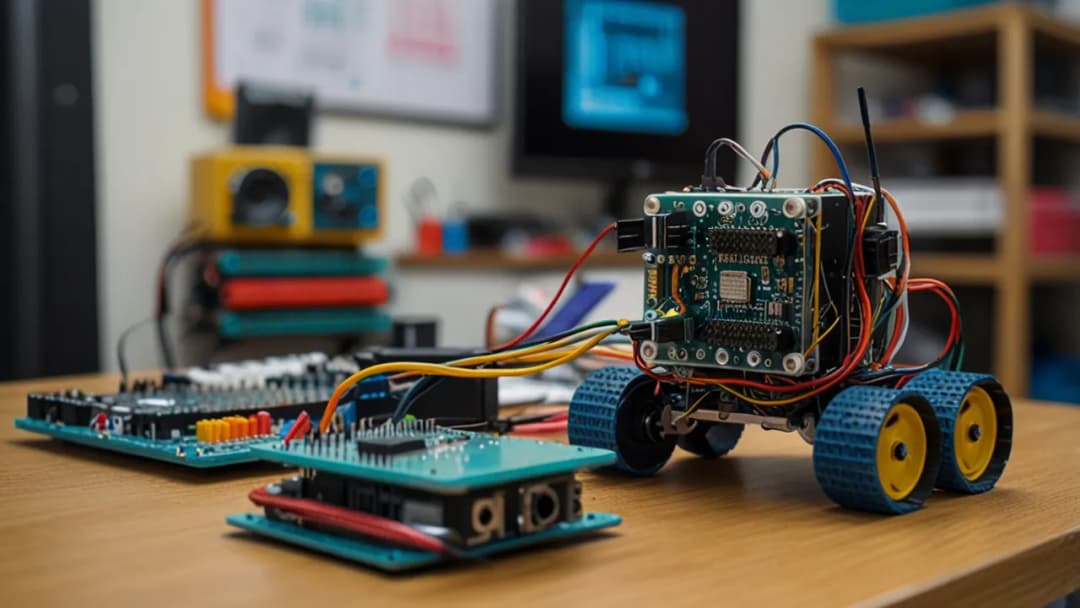
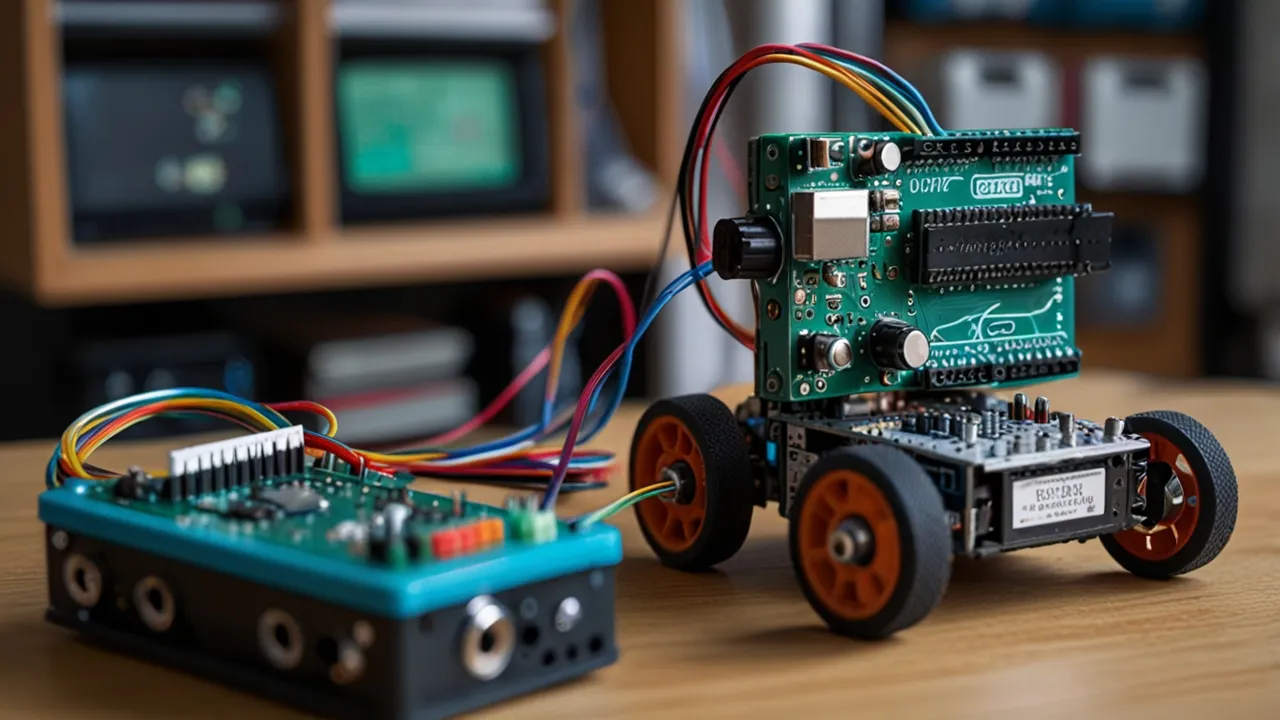
Niezbędne komponenty do budowy robota Arduino
Jak zrobić robota Arduino to pytanie, które nurtuje wielu początkujących entuzjastów elektroniki. Kluczem do sukcesu jest odpowiedni dobór komponentów. Serce każdego projektu robota z Arduino stanowi mikrokontroler. Arduino Uno to najpopularniejszy wybór ze względu na swoją wszechstronność i łatwość użycia.
Silniki są niezbędne do wprawienia robota w ruch. Możemy wybierać między silnikami prądu stałego a serwomechanizmami. Te pierwsze świetnie sprawdzają się w napędzie kół, podczas gdy serwomechanizmy umożliwiają precyzyjne ruchy ramion czy chwytaków.
Czujniki to "zmysły" naszego robota. Ultradźwiękowe czujniki odległości pozwalają na wykrywanie przeszkód, a czujniki linii są kluczowe dla robotów typu Line Follower Arduino. Wybór czujników zależy od planowanej funkcjonalności naszego urządzenia.
Zasilanie to kwestia kluczowa w budowie robota Arduino. Baterie lub akumulatory muszą zapewnić odpowiednie napięcie i pojemność, by robot mógł działać przez dłuższy czas. Warto rozważyć także wykorzystanie powerbanku dla wygody ładowania.
- Arduino Uno lub kompatybilna płytka
- Silniki DC lub serwomechanizmy
- Sterownik silników (np. L293D)
- Czujniki (ultradźwiękowe, linii)
- Baterie lub akumulator
- Płytka stykowa i przewody połączeniowe
- Koła i podwozie
- Przełącznik zasilania
Przygotowanie do montażu robota
Zanim przystąpimy do budowy robota Arduino, musimy zadbać o odpowiednie narzędzia. Lutownica, multimetr i zestaw śrubokrętów to podstawa. Nie zapomnijmy o cążkach do cięcia przewodów i pincecie do precyzyjnych prac.
Miejsce pracy powinno być dobrze oświetlone i zorganizowane. Antystatyczna mata ochroni nasze komponenty przed uszkodzeniem. Warto także zaopatrzyć się w lupę lub mikroskop do dokładnego oglądania połączeń.
Bezpieczeństwo to priorytet. Zawsze pracujmy w okularach ochronnych i unikajmy luźnych ubrań. Pamiętajmy o wyłączaniu zasilania przed wprowadzaniem zmian w obwodzie. To podstawy, które uchronią nas przed nieprzyjemnymi niespodziankami.
Czytaj więcej: Creality CR-10S Pro: Zaawansowana drukarka 3D dla wymagających
Krok po kroku: montaż robota Arduino
Przygotowanie platformy bazowej
Wybór odpowiedniej platformy to fundament projektu robota z Arduino. Możemy skorzystać z gotowych zestawów lub stworzyć własną bazę z płyty akrylowej czy drewnianej. Kluczowe jest, by była stabilna i miała miejsce na wszystkie komponenty.
Przygotowując platformę, warto zaznaczyć miejsca na silniki, Arduino i czujniki. Użyjmy linijki i ołówka do precyzyjnego rozmieszczenia elementów. Pamiętajmy o zostawieniu miejsca na przewody i ewentualne rozbudowy w przyszłości.
Instalacja mikrokontrolera Arduino
Arduino to mózg naszego robota. Umieśćmy go w centralnym punkcie platformy, gdzie będzie łatwo dostępny. Możemy przykręcić go śrubkami lub przymocować taśmą dwustronną, ale uważajmy, by nie uszkodzić płytki.
Przy instalacji zwróćmy uwagę na dostęp do portu USB. Będzie nam potrzebny do programowania i debugowania. Upewnijmy się, że Arduino jest stabilnie zamocowane i nie porusza się podczas jazdy robota.
Teraz to dobry moment, by zaplanować rozmieszczenie przewodów. Użyjmy kolorowych kabli dla różnych funkcji - ułatwi to późniejsze modyfikacje. Pamiętajmy o zostawieniu luzu na przewodach, by nic się nie wyrwało podczas ruchu.
Podłączanie silników
Silniki to kluczowy element w budowie robota Arduino. Zacznijmy od przymocowania ich do platformy. Użyjmy mocnych uchwytów lub kleju, by zapewnić stabilność podczas pracy robota.
Następnie podłączmy silniki do sterownika. L293D to popularny wybór, który pozwala na kontrolę kierunku i prędkości. Upewnijmy się, że połączenia są solidne i zabezpieczone przed przypadkowym rozłączeniem.
Teraz czas na podłączenie sterownika do Arduino. Używamy pinów PWM do kontroli prędkości i pinów cyfrowych do kierunku. Dokładnie sprawdźmy schemat połączeń, by uniknąć pomyłek.
Na koniec zamontujmy koła. Upewnijmy się, że są dobrze wyważone i nie ocierają o platformę. Dobrze dopasowane koła to gwarancja płynnego ruchu naszego robota.
Montaż i konfiguracja czujników
Czujniki to oczy i uszy naszego robota Arduino. Dla Line Follower Arduino kluczowe będą czujniki linii. Montujemy je z przodu robota, tuż nad powierzchnią, po której będzie się poruszał.
Czujniki ultradźwiękowe świetnie sprawdzą się do wykrywania przeszkód. Umieśćmy je na froncie robota, upewniając się, że mają czyste pole widzenia. Pamiętajmy o prawidłowym kącie nachylenia, by uzyskać najlepsze wyniki.
Podłączamy czujniki do odpowiednich pinów Arduino. Dla czujników analogowych używamy pinów A0-A5, dla cyfrowych - dowolnych pinów cyfrowych. Sprawdźmy dwukrotnie połączenia, by uniknąć błędów w odczytach.
Zasilanie robota
Wybór odpowiedniego zasilania to klucz do długotrwałej pracy robota Arduino. Możemy użyć pakietu baterii AA lub dedykowanego akumulatora Li-Po. Upewnijmy się, że napięcie jest odpowiednie dla naszego układu.
Zamontujmy przełącznik zasilania w łatwo dostępnym miejscu. To ważne dla bezpieczeństwa i wygody użytkowania. Zabezpieczmy wszystkie połączenia przed zwarciem, używając koszulek termokurczliwych lub taśmy izolacyjnej.
Podstawy programowania Arduino dla robotyki
Programowanie robota Arduino zaczynamy od zainstalowania Arduino IDE. To intuicyjne środowisko pozwoli nam pisać, kompilować i wgrywać kod do naszego robota. Pobierzmy najnowszą wersję ze strony producenta.
Struktura kodu Arduino opiera się na dwóch głównych funkcjach: setup() i loop(). W setup() inicjalizujemy piny i ustawiamy początkowe wartości. Loop() to serce programu, wykonywane w nieskończonej pętli.
Zmienne to podstawa elastycznego kodu. Definiujmy je na początku programu, nadając im znaczące nazwy. To ułatwi późniejsze modyfikacje i debugowanie.
Funkcje to sposób na organizację kodu. Twórzmy oddzielne funkcje dla różnych zadań robota, np. moveForward() czy detectObstacle(). To zwiększy czytelność i ułatwi zarządzanie projektem.
Biblioteki to potężne narzędzie w Arduino. Korzystajmy z gotowych rozwiązań dla silników czy czujników. To zaoszczędzi nam czas i zwiększy efektywność kodu.
- Struktura programu (setup() i loop())
- Deklaracja i inicjalizacja zmiennych
- Funkcje i ich parametry
- Instrukcje warunkowe (if, else)
- Pętle (for, while)
Pierwszy kod dla twojego robota Arduino
Zacznijmy od prostego kodu, który pozwoli naszemu robotowi Arduino poruszać się i reagować na otoczenie. Struktura kodu będzie zawierać inicjalizację pinów, funkcje ruchu i logikę wykrywania przeszkód.
W funkcji setup() zdefiniujemy piny dla silników i czujników. Loop() będzie zawierać główną logikę działania robota, sprawdzając czujniki i podejmując decyzje o ruchu.
Oto przykładowy kod dla prostego robota omijającego przeszkody:
#define LEFT_MOTOR_PIN 5
#define RIGHT_MOTOR_PIN 6
#define ULTRASONIC_TRIG 9
#define ULTRASONIC_ECHO 10
void setup() {
pinMode(LEFT_MOTOR_PIN, OUTPUT);
pinMode(RIGHT_MOTOR_PIN, OUTPUT);
pinMode(ULTRASONIC_TRIG, OUTPUT);
pinMode(ULTRASONIC_ECHO, INPUT);
}
void loop() {
if (checkDistance() < 20) {
avoid();
} else {
moveForward();
}
}
void moveForward() {
digitalWrite(LEFT_MOTOR_PIN, HIGH);
digitalWrite(RIGHT_MOTOR_PIN, HIGH);
}
void avoid() {
digitalWrite(LEFT_MOTOR_PIN, LOW);
digitalWrite(RIGHT_MOTOR_PIN, HIGH);
delay(1000);
}
int checkDistance() {
// kod pomiaru odległości
}
W tym kodzie definiujemy piny dla silników i czujnika ultradźwiękowego. Funkcja moveForward() wprawia robota w ruch, a avoid() pozwala mu ominąć przeszkodę.
Funkcja checkDistance() (nie pokazana w całości) mierzy odległość do przeszkody. Jeśli jest mniejsza niż 20 cm, robot wykonuje manewr omijania. W przeciwnym razie kontynuuje jazdę do przodu.
Testowanie i debugowanie robota Arduino
Po wgraniu kodu, czas na testy. Uruchommy robota w bezpiecznym otoczeniu i obserwujmy jego zachowanie. Zwróćmy uwagę, czy reaguje prawidłowo na przeszkody i czy ruchy są płynne.
Jeśli coś nie działa, nie panikujmy. Debugowanie to normalny etap projektu robota z Arduino. Użyjmy funkcji Serial.print() do wyświetlania wartości zmiennych w monitorze szeregowym. To pomoże nam zrozumieć, co dzieje się w kodzie.
Sprawdźmy połączenia elektryczne. Luźny przewód może powodować nieprzewidywalne zachowania. Użyjmy multimetru do weryfikacji napięć i ciągłości obwodów.
Jeśli robot nie reaguje na przeszkody, sprawdźmy czujniki. Możliwe, że są źle skalibrowane lub nieprawidłowo podłączone. Przetestujmy je osobno, by upewnić się, że działają poprawnie.
| Problem | Przyczyna | Rozwiązanie |
|---|---|---|
| Robot nie rusza | Brak zasilania | Sprawdź baterie i połączenia |
| Nierówna jazda | Różne prędkości silników | Dostosuj wartości PWM |
| Brak reakcji na przeszkody | Wadliwy czujnik | Sprawdź podłączenie i kod czujnika |
| Przypadkowe ruchy | Zakłócenia elektryczne | Użyj kondensatorów do filtracji |
| Przegrzewanie się układu | Zbyt duży pobór prądu | Sprawdź obciążenie i użyj radiatora |
Rozbudowa i ulepszanie robota Arduino
Nasz podstawowy robot Arduino to dopiero początek przygody. Możemy go rozbudować, dodając nowe funkcjonalności. Co powiesz na dodanie modułu Bluetooth do zdalnego sterowania?
Warto pomyśleć o dodaniu wyświetlacza LCD. Pozwoli to na monitorowanie stanu robota w czasie rzeczywistym. Możemy wyświetlać informacje o odległości do przeszkód czy poziomie naładowania baterii.
Dla zwiększenia precyzji ruchu, rozważmy dodanie enkoderów do kół. Dzięki nim robot będzie mógł dokładnie mierzyć przejechaną odległość i korygować swoją pozycję.
- Dodanie modułu Bluetooth do zdalnego sterowania
- Implementacja wyświetlacza LCD do monitorowania stanu robota
- Montaż enkoderów dla precyzyjnego pomiaru ruchu
- Integracja modułu kamery do rozpoznawania obrazu
- Zastosowanie czujnika żyroskopowego dla lepszej stabilizacji
Projekty inspirowane robotem Arduino
Arduino robot krok po kroku to dopiero początek fascynującej podróży. Możliwości są niemal nieograniczone. Rozważmy stworzenie robota sprzątającego, który automatycznie omija przeszkody i zbiera drobne przedmioty.
Innym ciekawym projektem jest robot rysujący. Wyposażony w uchwyt na marker i precyzyjne serwomechanizmy, może tworzyć intrygujące wzory na papierze. To świetne połączenie sztuki i technologii.
Dla miłośników roślin, robot podlewający to praktyczne rozwiązanie. Wyposażony w czujnik wilgotności gleby, może autonomicznie dbać o rośliny doniczkowe, zapewniając im optymalną ilość wody.
A co powiesz na robota-przewodnika? Taki projekt mógłby wykorzystywać GPS i mapy do nawigacji po określonym terenie, np. kampusie uniwersyteckim czy muzeum.
| Typ robota | Główne komponenty | Zastosowanie |
|---|---|---|
| Line Follower Arduino | Czujniki linii, silniki DC | Śledzenie trasy, logistyka |
| Robot sprzątający | Szczotki, pojemnik na śmieci, czujniki odległości | Automatyczne sprzątanie pomieszczeń |
| Robot rysujący | Serwomechanizmy, uchwyt na marker | Tworzenie rysunków, sztuka generatywna |
| Robot podlewający | Czujnik wilgotności, pompa wody | Automatyczna pielęgnacja roślin |
Każdy z tych projektów to nowe wyzwanie i szansa na pogłębienie wiedzy o programowaniu robota Arduino. Pamiętajmy, że kluczem do sukcesu jest cierpliwość i systematyczne podejście do rozwiązywania problemów.
Eksperymentowanie z różnymi typami robotów pozwoli nam lepiej zrozumieć możliwości Arduino i rozwinąć nasze umiejętności w dziedzinie robotyki. Niezależnie od tego, czy tworzymy prostego Line Follower Arduino, czy zaawansowanego robota z rozpoznawaniem obrazu, każdy projekt to krok w kierunku zostania ekspertem w dziedzinie DIY robot Arduino.
Pamiętajmy, że jak zrobić robota Arduino to proces, który wymaga czasu i praktyki. Nie zniechęcajmy się początkowymi niepowodzeniami. Każdy błąd to lekcja, która przybliża nas do stworzenia doskonałego robota. Eksperymentujmy, uczmy się i przede wszystkim - bawmy się dobrze podczas tworzenia naszych Arduino robotów!
Twój pierwszy robot Arduino: od koncepcji do realizacji
Budowa robota Arduino to fascynująca przygoda, która łączy w sobie elementy elektroniki, programowania i kreatywnego myślenia. Rozpoczynając od wyboru podstawowych komponentów, poprzez staranne planowanie i montaż, aż po napisanie pierwszego kodu, każdy etap tego procesu dostarcza cennych lekcji i satysfakcji.
Kluczem do sukcesu jest systematyczne podejście i cierpliwość. Rozpoczynając od prostego projektu, takiego jak Line Follower Arduino, możemy stopniowo rozbudowywać nasze umiejętności i wiedzę. Pamiętajmy, że każdy problem napotkany podczas tworzenia to szansa na naukę i udoskonalenie naszego robota.
Możliwości rozbudowy i modyfikacji są praktycznie nieograniczone. Od dodania nowych czujników, przez implementację zaawansowanych algorytmów, aż po tworzenie specjalistycznych robotów do konkretnych zadań - wszystko zależy od naszej wyobraźni i determinacji. Arduino robot krok po kroku to nie tylko projekt, to początek fascynującej podróży w świat robotyki i automatyki.



